
DA300交流伺服驱动器的成熟应用
一:固晶机工作原理及特点
什么是固晶机
固晶机又称上晶机,晶片粘贴机,绑定芯片机。它是一种固定晶体,半导体封装的机械。主要运用于各种(WIRE BONDER)金丝超声波焊接设备的引线框架压板,以及各种(DIE BONDER)芯片贴装。
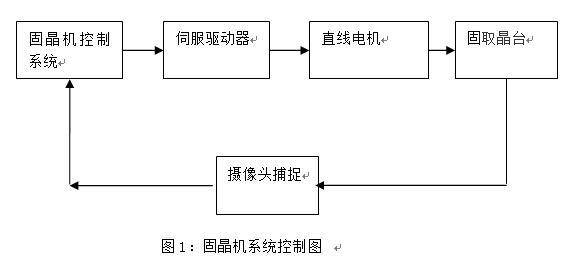
它具有取晶、点胶、固晶等功能于一体,设备是由电脑软件控制板卡,发脉冲给伺服驱动器,伺服驱动器走位置模式接收脉冲后驱动直线电机,从而带动取晶台或者固晶台动作,摄像头会捕捉晶体变化反馈给控制系统调整下一步控制指令。
二:案例分析
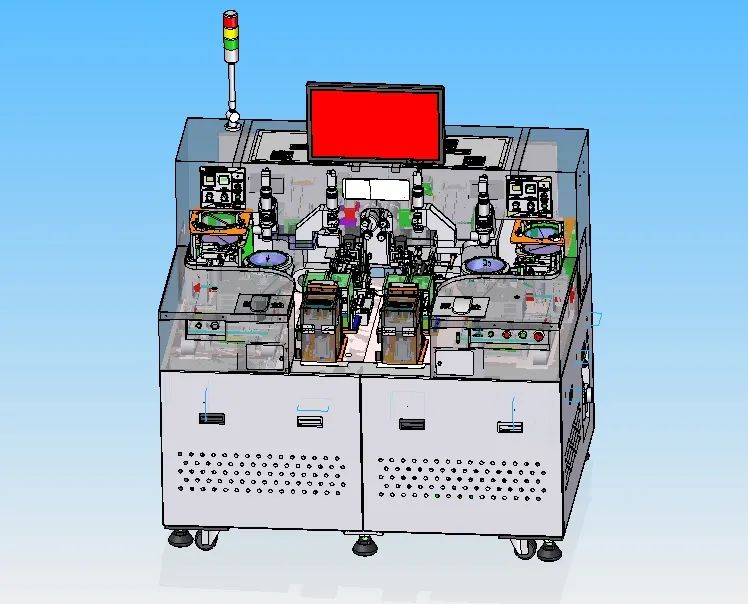
仅以英威腾DA300驱动器在某固晶机厂家应用为例进行介绍,如图所示, 整个机器分为两边,左半边和右半边完全对称相同,其实就是相当于两个固晶机组成的一个大的固晶机,互相不干扰。从左往右分别为取晶台、固晶台。目前一般的机器中会在取晶台和固晶台使用英威腾DA300,每个台都有X轴Y轴,所以一台固晶机会用到8台DA300驱动器。
01:工作原理
整个过程是取晶台、固晶台、摆臂、点胶机构、视觉检测等互相配合完成的,如图2为固晶机的俯视结构图。
由上料机构把PCB板传送到工作台卡具上固晶台的工作位置,先由点胶机构将PCB需要键合晶片的位置点胶,然后摆臂从原点位置运动到吸取晶片位置,晶片放置在取晶台的薄膜支撑的扩张器晶片盘上,摆臂到位后吸嘴向下运动,顶针向上运动顶起晶片,在拾取晶片后摆臂返回原点位置(漏晶检测位置),摆臂再从原点位置运动到键合位置,吸嘴向下键合晶片后摆臂再次返回原点位置,这样就是一个完整的键合过程。
当一个节拍运行完成后,由机器视觉检测得到晶片下一个位置的数据,并把数据传送给晶片盘电机,让电机走完相应的距离后使下一个晶片到对准的拾取晶片位置。PCB板的点胶键合位置也是同样的过程,直到PCB板上所有的点胶位置都键合好晶片,再由传送机构把PCB板从工作台移走,并装上新的PCB板开始新的工作循环。

图2:固晶机的俯视结构图
整个过程的速度非常快,随着多打的板子的孔越小,精度也就要求更高,而且需要足够稳定。客户一般需要在位置指令发送给驱动器结束时间到10ms的时候滞留脉冲为5个以下,如图3的波形示例。
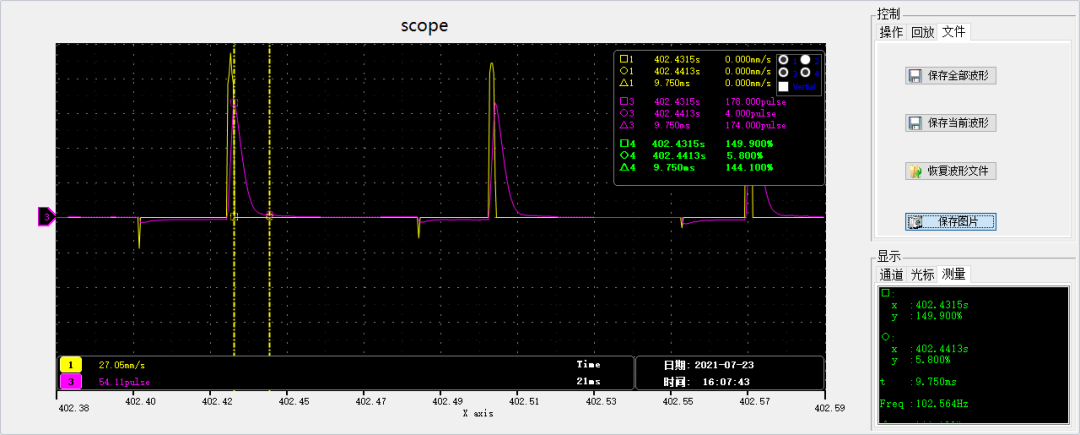
图3:示波器波形图

图4:部分电气柜图
02:实现功能
英威腾DA300带直线电机为带第三方电机,且直线电机的调试与旋转电机的调试有一些差别。第三方电机是没有电机码直接导入参数的,所以需要手动输入电机参数。
首先打开SeevoPlorer软件,用户权限选择开发人员,设置配置表为DA300_Line_1.04,然后查看帮助—关于,界面的文件显示为直线电机的配置文件。同时可以看到R0.00组电机转速是mm/s。
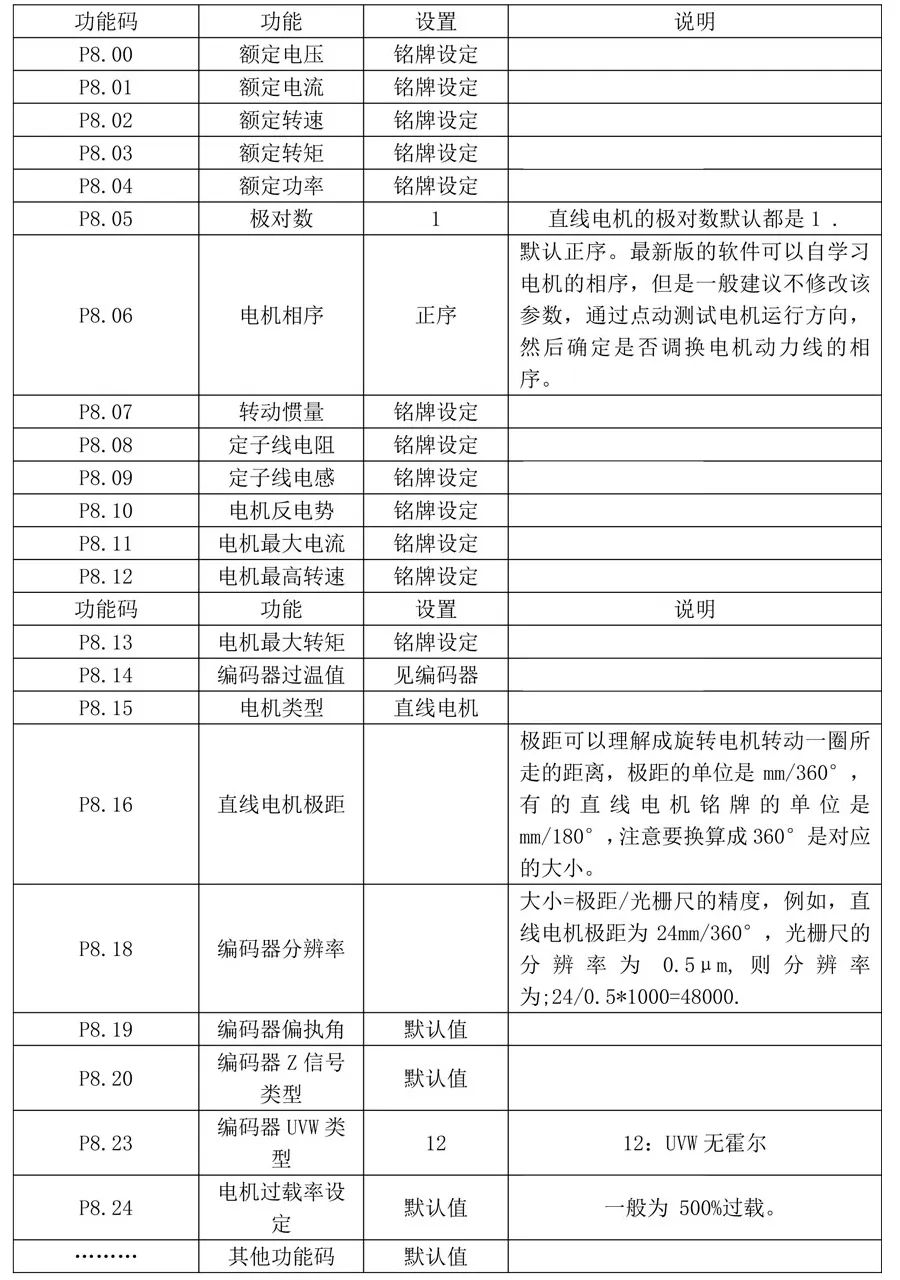
其次将客户给到的电机参数手动输入P8组,下图为现场的直线电机参数表格示例。

03:P8组的参数
04:注意事项
需要注意的是电机的额定电流、电压、电阻、电感、功率、反电动势常数、磁变周期为P8.16的电机极距,编码器分辨率需要算好后正确输入,电机参数中吸力大小后的参数不需要管。
为了使直线伺服电机的正方向与编码器的正计数方向一致,需选择直线伺服电机的相序,在设定直线伺服电机的相序前,需确认以下几点:
①用手将电机从行程的一端移动到另一端后,使用面板或上位机软件,通过监控参数 R0.02[反馈脉冲累积]确认返回的脉冲数是否正确。例如使用的光栅尺分辨率为 1um,试着用手将直线伺服电机朝线性编码器的正计数方向移动 1cm,此时其反馈脉冲数为:1cm/1um=10000 脉冲(注:实际的监控显示与移动距离之间存在误差,因此接近上述值就没有问题)。
②按照表2设置好参数

表2:P9组参数
然后将P9.22人工角度从0-180每30°增加一次,观测电机动子的移动方向是否对应编码器计数的正方向,若相反,则任意调换UVW中的两相顺序,重新上电后再试,直到电机移动的方向与编码器计数方向一致。
注意:必须满足电机相序与编码器正序方向一致,如果在未正确连接电机UVW三相动力线的情况下启动电机,会导致电机无法启动或失控,因此请务必在启动前进行确认。
05最后进行磁极检测一般直线电机位置反馈传感器都没有UVW信号,因此在运行前必须进行磁极检测以确定伺服直线电机的电气角坐标。
伺服系统在未正确获取伺服电机的电气角之前无法进行正常的运动控制,此时监控参数r0.30系统状态会显示为2(磁极未确定),上位系统也可通过IO口伺服准备就绪(/RDY)输出信号监控伺服状态。
有3种方法可以启动伺服检测,基本最多使用的就是直接使用P6.50进行使能(需要断使能)的方法。
直线电机的调试一定要把电机参数输入正确,保证相序无问题的前提下才能进行点动测试。
三:英威腾优势固晶机行业目前逐渐国产化,英威腾DA300交流伺服驱动器在固晶机上的成熟应用,以其拥有增益切换、手动/自动陷波滤波器、手动/自动制振滤波器、高速响应、低噪音、低电磁干扰等优点,使得固晶的动作更加精准、快速,提高材料的产能和质量,在市场应用上,受到了广泛客户的认可。
 首页
首页 电话
电话 邮箱
邮箱